Mini 4WD コース分析とモーター選び:区間比率で高速 / テクニカル / 立体を判定
公開 2026-06-04 · 更新 2026-07-14
同じモーターでもコースが違えば結果は段違い —— 高速コースの王者モーターを立体コースに持ち込むと完走すら難しいことも。本記事は定量化できる「コース区間比率法」を提案:あらゆる Mini 4WD® コースをストレート・カーブ・特殊の 3 区間に分解し、比率で高速・テクニカル・立体を判定して、最適なモーター・ギア比・タイヤ径を対応づけます。
なぜモーター選びは「コースを読む」ことから始まるのか
モーター選びの最大の誤りは、モーターのスペックだけを見てコース特性を見ないことです。27,000 RPM のスプリント系モーターは、急カーブとジャンプだらけの立体コースではコースアウトを繰り返すだけ。逆に高トルクモーターは長いストレートで高回転モーターに差をつけられます。
日本や欧米の上級コミュニティは「まずコースを読み、それからセッティングを決める」順序で考えます(タミヤ公式 Setup Guide も「Study the course」と明言)。しかし多くの攻略は定性的な記述(「ここが難所」)に留まり、定量化・再現可能な分類法がありません。本記事はその欠落を埋めます。
コースの 3 つの基本区間
どんなに複雑な Mini 4WD® コースも、3 つの基本区間に分解できます:
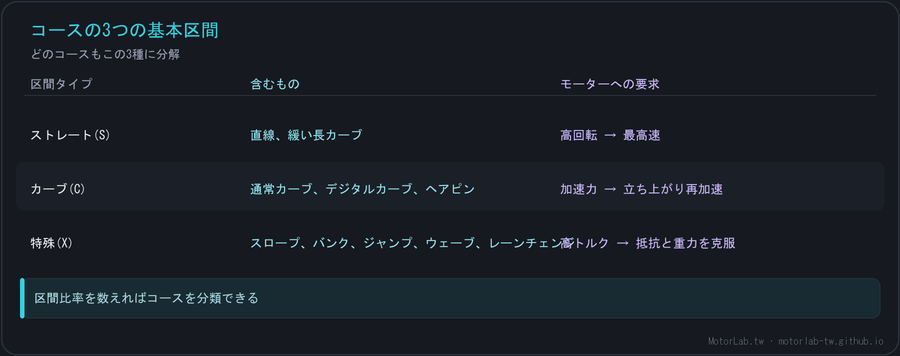
| 区間タイプ | 含むもの | モーターへの要求 |
|---|---|---|
| ストレート(S) | 直線、緩い長カーブ | 高回転 → 最高速 |
| カーブ(C) | 通常カーブ、デジタルカーブ、ヘアピン | 加速力 → 立ち上がり再加速 |
| 特殊(X) | スロープ、バンク、ジャンプ、ウェーブ、レーンチェンジ | 高トルク → 抵抗と重力を克服 |
区間を数える単位は「コース 1 枚」(タミヤ ジュニアサーキット 1 枚 = 1 ユニット)を推奨。同タイプの連続区間は 1 カウントにまとめます。
比率で分類:高速・テクニカル・立体
3 つの区間それぞれの比率を数え、以下のしきい値で判定します(3 つの名称はいずれも日 / 英 / 台コミュニティ共通の用語):
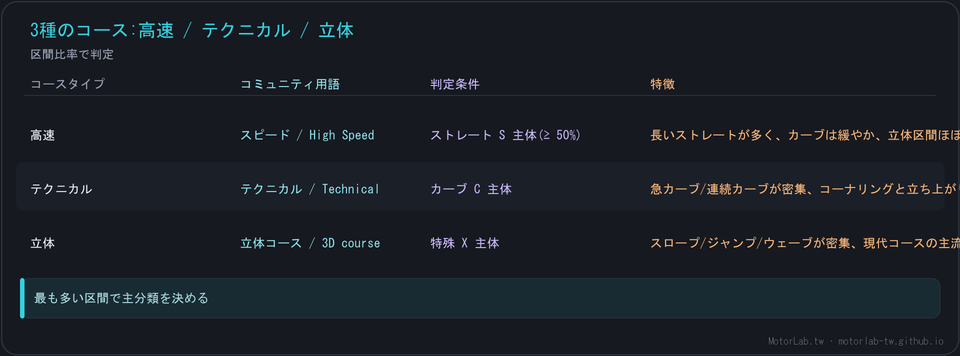
| コースタイプ | コミュニティ用語 | 判定条件 | 特徴 |
|---|---|---|---|
| 高速 | スピード / High Speed | ストレート S 主体(≥ 50%) | 長いストレートが多く、カーブは緩やか、立体区間ほぼ無し |
| テクニカル | テクニカル / Technical | カーブ C 主体 | 急カーブ/連続カーブが密集、コーナリングと立ち上がり加速が鍵 |
| 立体 | 立体コース / 3D course | 特殊 X 主体 | スロープ/ジャンプ/ウェーブが密集、現代コースの主流 |
実際のコースの多くは混合型。比率が最も高い区間で主分類を決めます。2 つが近い場合は要求が厳しい方を採用(通常は立体 > テクニカル > 高速)。
3 タイプ別モーター選び対照
モーターのスペックは タミヤ全 15 種モーター規格対照表 を参照:

| コースタイプ | モーター特性 | 推奨モーター(標準シリーズ) | ギア比 | タイヤ径 |
|---|---|---|---|---|
| 高速 | 高回転、最高速優先 | Sprint-Dash, Rev-Tuned 2 | 3.5:1 / 3.7:1 | 大径 |
| テクニカル | 速度トルクのバランス、立ち上がり加速 | Atomic-Tuned 2, Hyper-Dash 3 | 4:1 / 4.2:1 | 中径 |
| 立体 | 高トルク、着地再加速 | Torque-Tuned 2, Power-Dash | 4.5:1 / 5:1 | 小径 |
PRO シャーシ(両軸)の対応:高速 → マッハダッシュ PRO、テクニカル → ハイパーダッシュ PRO / アトミックチューン 2 PRO、立体 → トルクチューン 2 PRO。立体コースの逆説:ジャンプが密集すると「速すぎることが最大の敵」—— 速すぎると飛び過ぎて着地で制御を失います。やみくもに回転数を上げるより、トルク型 + 強力ブレーキを選ぶべき。
核心原理:回転数とトルクは本質的に相反します(タミヤ 15 種で RPM 1.2 万〜2.8 万 はトルク 1.0〜2.0 mN·m と反比例)。選定とは「コースが必要とするのは最高速か加速か」のトレードオフです。
実例:2025 タミヤ ジャパンカップ「Wakening Venom Circuit 2025」
2025 年のタミヤ公式コースで比率法を実演します。本コース(巳年のヘビ型テーマ、全長約 212m)の主な区間:
| # | 区間名 | タイプ |
|---|---|---|
| 1 | Snake Raise Stretch(4 連ストレート) | ストレート S |
| 2 | XLARGE Slope(上り + ジャンプ) | 特殊 X |
| 3 | D.D. Wave(ウェーブ + 下り) | 特殊 X |
| 4 | Slither Road(ローリング + ウェーブ) | 特殊 X |
| 5 | Yamaha Revs Changer(レーンチェンジ) | 特殊 X |
| 6 | Blurn Straight(ストレート + 3 連ジャンプ) | 特殊 X |
| 7 | FDK Variable Togro(270° 大回転) | カーブ C |
| 8 | Advan Climax Snake(連続フラットコーナー) | カーブ C |
比率計算:ストレート 1/8(12.5%)、カーブ 2/8(25%)、特殊 5/8(62.5%)。特殊区間 X が大きく主体 → 立体コースと判定(ウェーブ/スロープ/ジャンプ密集)。
選定提案:上表の通り、立体コースは高トルク + 着地再加速を優先 —— 標準シリーズなら パワーダッシュ / ハイパーダッシュ 3、4.5:1 のトルク寄りギア比 + 小径タイヤ。ブレーキ系は連続ジャンプとウェーブ区間用に特に強化。後半はフラット高速に近づくため、ブレーキ制御が成熟していればバランス型アトミックチューン 2 で後半に速度を稼ぐ手も —— これこそ立体コースの「速度 vs 制御」の典型的トレードオフです。
3 ステップでコース分析
- 区間を数える —— コース図または現地一周で、各枚を S / C / X とタグ付け、同タイプ連続はまとめる。
- 比率を計算 —— S% / C% / X% を算出、上記しきい値で判定。
- 選定を対応 —— 対照表でモーター + ギア比 + タイヤ径を選び、好みで微調整。
正しいモーター「タイプ」を選ぶのは第一歩に過ぎません —— 同型番でも 2 個のモーターは個体差と慣らし状態で実回転数・トルクが 10% 以上違うことも。各モーターに定量化できる健康指紋(実測回転数、電流、ベアリング τ 減衰)を構築すれば、同タイプの中から最良の 1 個を選んで投入できます。関連:モーター分析の 3 支柱方法論、タミヤ主要モーター特性と慣らし戦略対照。
レース結果を左右する要素は数多い —— モーターとコースタイプ以外にも、シャーシ剛性、ローラー構成、ブレーキ設定、バッテリー状態、タイヤグリップ、コーナリングライン、さらには当日の温湿度やコース継ぎ目の状態まで関わります。本記事の「区間比率法」とコース分析は、モーター候補を素早く絞り込むための思考フレームを提供するのみで、実例分析はあくまで参考用です。実際の出走は練習走行の実測データと個人の経験を基準にしてください。