Mini 4WD Track Analysis & Motor Selection by Section Ratio
Published 2026-06-04 · Updated 2026-07-14
The same motor can perform wildly differently on different tracks — a high-speed-course winner may struggle to even finish on a 3D course. This article introduces a quantifiable "track section-ratio method": break any Mini 4WD® track into straight, curve and special sections, use the ratios to classify it as high-speed, technical or 3D, then match the right motor, gear ratio and wheel diameter.
Why Motor Selection Starts With "Reading the Track"
The biggest mistake in motor selection is looking only at motor specs, not at track characteristics. A 27,000 RPM sprint motor will just keep flying off a 3D course full of sharp turns and jumps; conversely, a high-torque motor gets out-run by high-RPM motors on long straights.
Advanced communities in Japan and the West think in the order "read the course first, then decide the setting" (Tamiya's official Setup Guide also says "Study the course"). But most guides stop at qualitative descriptions ("this section is the tricky bit") and lack a quantifiable, repeatable classification method. This article fills that gap.
The Three Basic Section Types
Any Mini 4WD® track, however complex, breaks down into three basic section types:
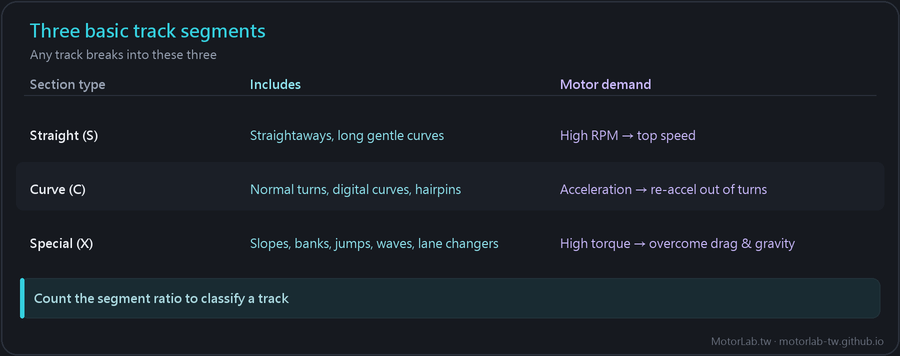
| Section type | Includes | Motor demand |
|---|---|---|
| Straight (S) | Straightaways, long gentle curves | High RPM → top speed |
| Curve (C) | Normal turns, digital curves, hairpins | Acceleration → re-accel out of turns |
| Special (X) | Slopes, banks, jumps, waves, lane changers | High torque → overcome drag & gravity |
Count sections in "track panels" (one Tamiya Junior Circuit panel = one unit); merge consecutive same-type sections into one count.
Classify by Ratio: High-Speed, Technical, 3D
Count each section type's share, then classify using these thresholds (all three names are common terms across JP / EN / TW communities):

| Track type | Community term | Condition | Characteristics |
|---|---|---|---|
| High-Speed | Speed / High Speed | Straights S dominate (≥ 50%) | Many long straights, gentle curves, almost no 3D sections |
| Technical | Technical / テクニカル | Curves C dominate | Dense sharp/consecutive turns; tests cornering & exit accel |
| 3D | 3D course / 立体コース | Special X dominate | Dense slopes/jumps/waves — the modern mainstream |
Most real tracks are mixed; classify by the section type with the highest share. If two are close, take the more demanding one (usually 3D > Technical > High-Speed).
Motor Selection by Track Type
Motor specs in the Tamiya 15-motor full lineup table:
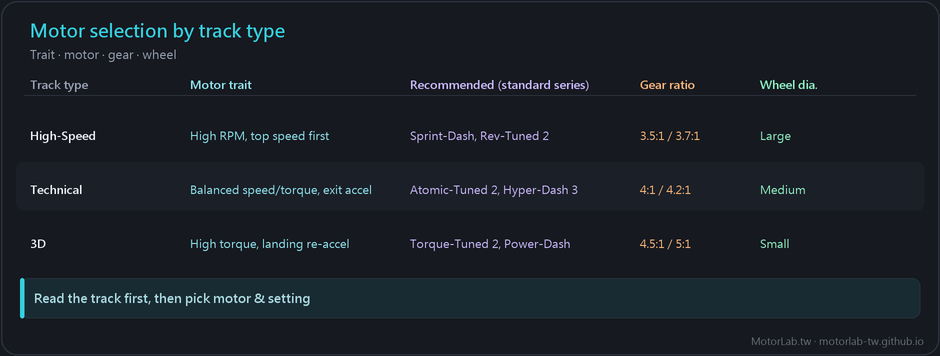
| Track type | Motor trait | Recommended (standard series) | Gear ratio | Wheel dia. |
|---|---|---|---|---|
| High-Speed | High RPM, top speed first | Sprint-Dash, Rev-Tuned 2 | 3.5:1 / 3.7:1 | Large |
| Technical | Balanced speed/torque, exit accel | Atomic-Tuned 2, Hyper-Dash 3 | 4:1 / 4.2:1 | Medium |
| 3D | High torque, landing re-accel | Torque-Tuned 2, Power-Dash | 4.5:1 / 5:1 | Small |
PRO chassis (double-shaft) equivalents: High-Speed → Mach-Dash PRO; Technical → Hyper-Dash PRO / Atomic-Tuned 2 PRO; 3D → Torque-Tuned 2 PRO. The 3D-course counterintuition: with dense jumps, "being too fast is the greatest enemy" — over-speed means overjumping and loss of control. Better to pick a torque motor + strong brakes than blindly chase RPM.
Core principle: RPM and torque are inherently opposed (across 15 Tamiya motors, RPM 12k–28k inversely tracks torque 1.0–2.0 mN·m). Selection is the trade-off between whether the track needs top speed or acceleration.
Worked Example: 2025 Tamiya Japan Cup "Wakening Venom Circuit 2025"
Let's apply the ratio method to the official 2025 Tamiya circuit (snake-themed for the Year of the Snake, ~212m long). Main sections:
| # | Section name | Type |
|---|---|---|
| 1 | Snake Raise Stretch (4 consecutive straights) | Straight S |
| 2 | XLARGE Slope (uphill + jump) | Special X |
| 3 | D.D. Wave (wave + downhill) | Special X |
| 4 | Slither Road (rolling fall + wave) | Special X |
| 5 | Yamaha Revs Changer (lane changer) | Special X |
| 6 | Blurn Straight (straight + triple jump) | Special X |
| 7 | FDK Variable Togro (270° turn) | Curve C |
| 8 | Advan Climax Snake (consecutive flat corners) | Curve C |
Ratio: straights 1/8 (12.5%), curves 2/8 (25%), special 5/8 (62.5%). Special sections X dominate heavily → classified as a 3D course (dense waves/slopes/jumps).
Selection: per the table, a 3D course prioritizes high torque + landing re-acceleration — from the standard series pick Power-Dash / Hyper-Dash 3 with a 4.5:1 torque-biased ratio and small wheels; reinforce the brake system for the consecutive jumps and wave sections. Since the back half flattens toward speed, mature brake control lets you run a balanced Atomic-Tuned 2 to grab speed there — the classic 3D-course "speed vs control" trade-off.
Three Steps to Analyze a Track
- Count sections — from the track map or a walk-around, tag each panel S / C / X, merge consecutive same-type.
- Compute ratios — calculate S% / C% / X% and apply the thresholds above.
- Match selection — use the table to pick motor + gear ratio + wheel diameter, then fine-tune to taste.
Picking the right motor "type" is just step one — two motors of the same model can differ over 10% in actual RPM and torque due to unit variance and break-in state. Build a quantifiable health fingerprint for each motor (measured RPM, current, bearing tau decay) to pick the best-condition one to race. Further reading: the three-pillar methodology for motor analysis, Tamiya motor specs & break-in reference.
Many factors decide a race result — beyond motor and track type, there's chassis rigidity, roller setup, brake tuning, battery condition, tire grip, cornering line, even temperature/humidity and track seam condition on the day. This "section-ratio method" and track analysis only provide a thinking framework to quickly narrow down motor candidates; the worked example is for reference only. For actual competition, rely on practice-run data and personal experience.