Why Mini 4WD Cars Crash: The Speed / Geometry / Stability Trigger Model
Published 2026-06-04
Crashes (course-outs) in racing are often dismissed as "bad luck," but they are predictable — the result of speed, track geometry and vehicle stability triggers stacking past a critical threshold. This article breaks crashes into the Speed / Geometry / Stability triggers, gives an on-site method to quickly count risk, and maps setup fixes to each risk level.
Crashes Aren't Random — They're Stacked Conditions
Core idea: a crash is not a random event, but the result of "speed trigger + geometry trigger + stability trigger" stacking past a critical threshold.
Most racers blame a crash on "this motor is too fast" or "bad luck" and then blindly slow down or swap motors — treating symptoms, not the cause. What you should actually do is identify how many risk triggers each corner / slope / jump hits at once: the same jump that a car clears cleanly under one trigger almost always crashes under three. The value here is making that judgment systematic and countable.
Speed Trigger
Speed-related crash causes — kinetic energy exceeding what the track can absorb.
| Standardized concept | Racer slang | Recommended fix |
|---|---|---|
| Corner entry too fast | over-speed into corner | Lower gear ratio / brake earlier / cap top speed |
| Insufficient braking | insufficient braking downhill | Stronger brakes / longer braking distance / earlier intervention |
| Jump take-off energy too high | over-speed jump | Brake before take-off / lower output / tune accel curve |
Geometry Trigger
Crash causes from track shape — curvature or elevation changes too fast for the car to recover its attitude.
| Standardized concept | Racer slang | Recommended fix |
|---|---|---|
| Curvature changes too fast (straight → sharp turn) | sharp transition | Brake earlier / outer guide / add brakes |
| Side force on landing (jump into corner) | jump into corner | Landing brake / lower CG / change wheel dia. |
| Attitude not recovered (continuous undulation) | undulating section | Raise rigidity / slow down / steady braking |
| Forced steering change (lane changer / fork) | lane changer | Stronger guide rollers / slow down / add stability |
Stability Trigger
Crash causes from the car itself — physical configuration that amplifies instability under disturbance.
| Standardized concept | Racer slang | Recommended fix |
|---|---|---|
| Center of gravity too high | high CG | Lower CG / rebalance weight / lower ride height |
| Insufficient lateral support (narrow base) | narrow base | Widen track / outer support |
| Braking curve mismatch | braking imbalance | Adjust brake hardness / front-rear split |
| Vibration amplification (low rigidity) | low rigidity | Reinforce chassis / reduce resonance |
| Dynamic asymmetry (uneven weight) | imbalance | Adjust CG / left-right symmetry |
Risk-Counting Model: Count Simultaneous Triggers
For every key structure on the track (corner / slope / jump / lane changer), count how many triggers it hits at once:
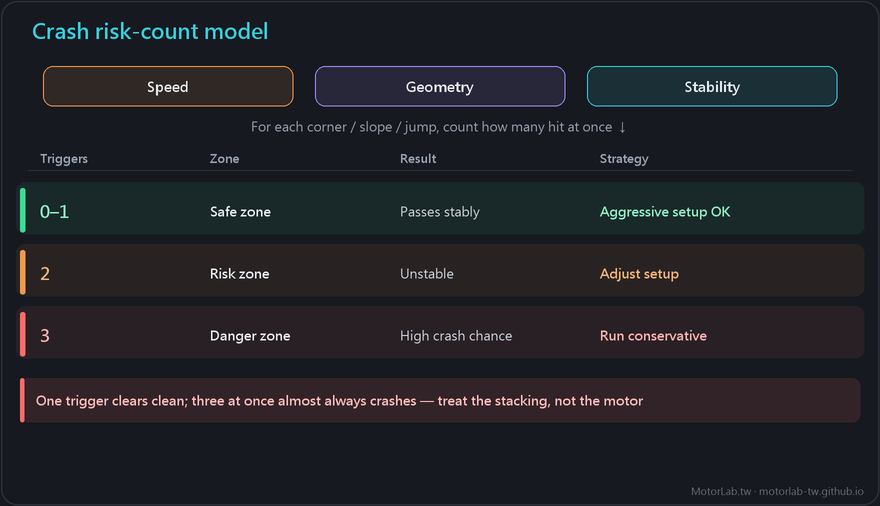
| Triggers at once | State | Outcome | Strategy |
|---|---|---|---|
| 0–1 | Safe zone | Passes stably | Can run aggressive setup |
| 2 | Risk zone | Unstable | Setup needs adjustment |
| 3 | Danger zone | High crash probability | Must run conservative |
Common Guaranteed-Crash Combos (Case Studies)
Typical scenarios where three triggers stack:
| Combo | Scene | Outcome | Recommended fix |
|---|---|---|---|
| High speed + sharp turn + high CG | Straight into corner | Almost certain crash | Slow down + lower CG + add brakes |
| Downhill + jump + weak brakes | Jump off slope | Loss of control in air | Stronger brakes + lower speed |
| Waves + high speed + low rigidity | Continuous section | Cumulative bounce-out | Raise rigidity + slow down |
| Jump + turn + light car | Jump into corner | Roll-over on landing | Add weight + stabilize landing |
Three-Step Workflow
- Scan the track — mark four key structures: jumps, sharp turns, waves, lane changers.
- Read triggers — for each structure, check the three triggers: Speed / Geometry / Stability.
- Count risk — 0–1 aggressive setup, 2 balanced setup, 3 conservative setup.
Risk-counting helps you decide fast on-site, but "how much to slow down, how hard to brake" still needs data — the same motor model can differ over 10% in actual output, and brake/ballast effects vary car to car. Log the RPM, current and attitude data from each practice run to turn "conservative / aggressive" from a feeling into a repeatable setup. Further reading: Mini 4WD track analysis & motor selection, the three-pillar methodology for motor analysis.
The worked example is for reference only; for actual competition, rely on practice-run data and personal experience. Many factors affect crashes — this three-trigger model provides a framework to quickly assess risk, not a formula that guarantees no crashes.