Select Before Break-in: Read a Motor's Constitution by Current
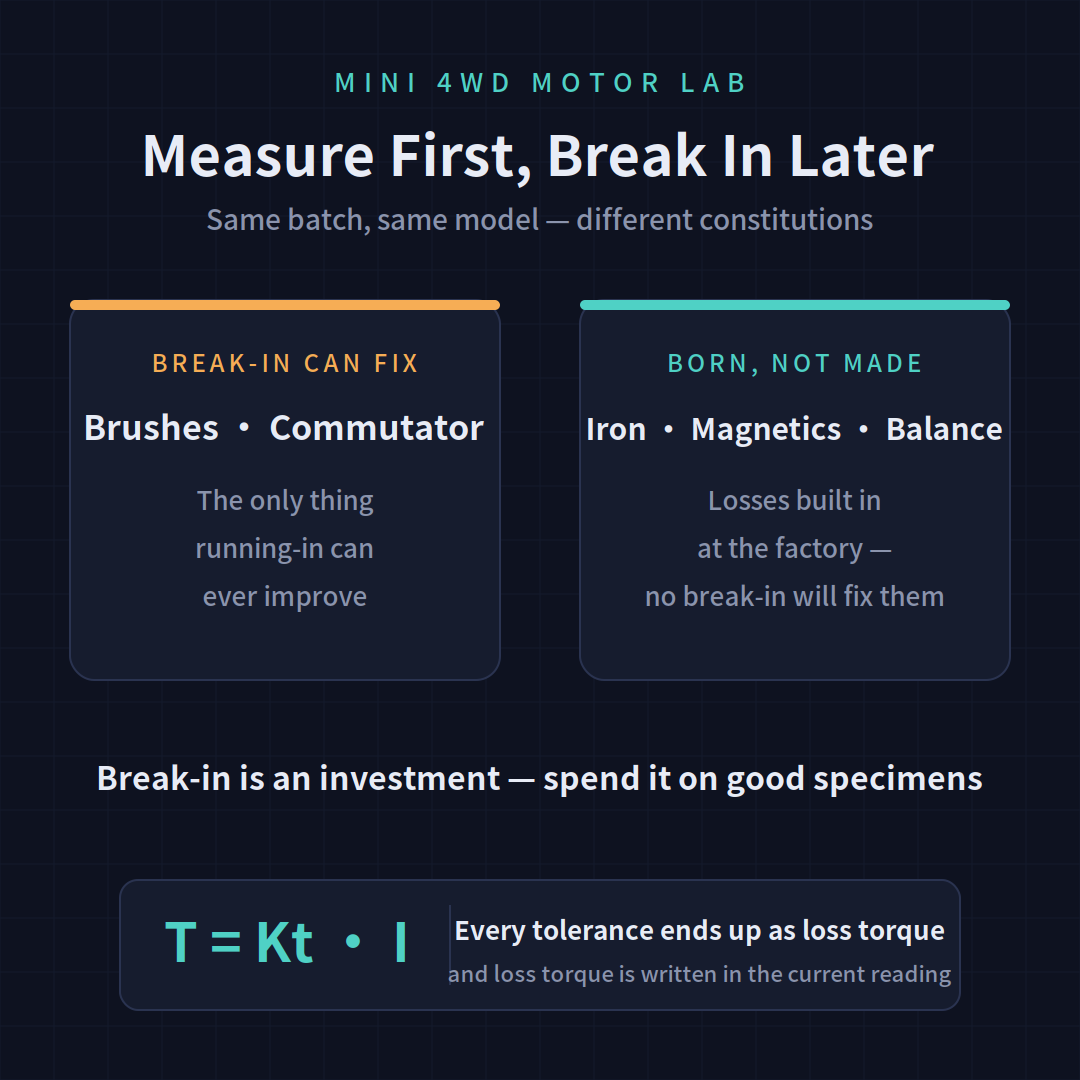
Same batch, same model — yet no two motors are equal. Break-in only improves one thing: the contact between brushes and commutator. Iron core, magnetic circuit, rotor balance — those are born, not made, and no amount of running-in fixes them. The right move is measure first, break in later: let data pick the specimens worth developing before you spend time and brush life on them.
Why select first
Stamping stress on the lamination edges, stack tightness, magnet-to-can concentricity, rotor balance — every one of these manufacturing tolerances turns into loss torque: torque the motor burns just to spin itself, before it ever pushes the car.
Break-in is an investment; time and brush life are the cost. Spend it on an inherently good specimen and it compounds. Grind away at a high-loss motor and all you get is a smoother mediocre motor.
Current is the motor's constitution
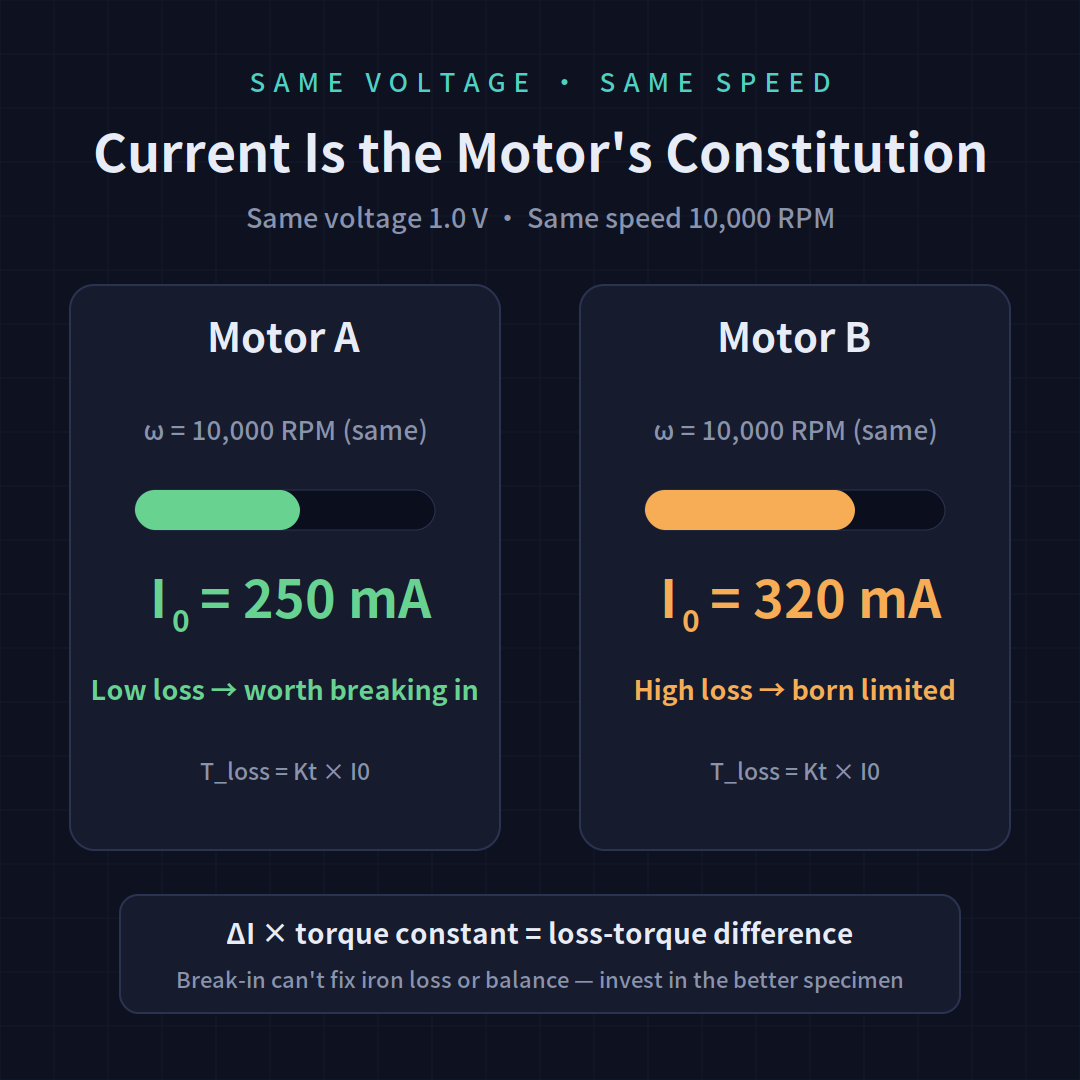
Physically, torque is proportional to current: T = Kt × I. So at the same operating point, the motor drawing less current has lower internal losses — more input power reaches the wheels. That no-load current reading isn't superstition; it's the motor's constitution (loss torque T_loss = Kt × I₀).
Example: locked to the same speed, motor A reads 250mA and motor B reads 320mA → A has lower losses and is worth breaking in; B is born limited and won't catch up no matter how long you run it.
The key to measuring right: lock the speed, then compare
Comparing current at a fixed voltage hides a trap: a good motor spins faster, and losses rise with speed (hysteresis ∝ speed, eddy + windage ∝ speed²), so the faster motor's losses inflate and the individual differences get compressed — they look closer than they really are. The right method is to lock every motor to the same speed (feedback control adjusts the voltage to hold your set speed).
Locking the speed hands you two independent indicators at once: current → the loss torque at that speed (same baseline, apples to apples); voltage (the output needed to hold the speed) → a free read of Ke (magnetic strength), Ke = (V − I·R) / speed. Now you can split two motors' difference into two independent components — magnetic difference and loss difference. You may find two motors with identical no-load current are actually one weak-magnet/low-loss and one strong-magnet/high-loss — completely different characters.
Which numbers can be used as direct guidance?
Not every number is “lower is better.” Physically they fall into three classes; mixing them up kills good motors:
① One-directional — clear direction, rank directly
| Indicator | Direction | Physical reason |
|---|---|---|
| Loss torque T_loss (same speed) | lower is better | pure waste, never reaches the wheels |
| Winding resistance R | lower is better | copper loss I²R, no compensating upside |
| Mechanical friction | lower is better | deducts across the whole speed range |
| High-speed loss (eddy term) | lower is better | amplified by the square at high speed |
| Thermal drift (current rise over a long run) | lower is better | shows its face late in a race |
| Current ripple | lower is better | balance + commutation quality, also a wear omen |
| Motor constant Km = Kt/√R | higher is better | torque per watt of copper loss; a figure of merit independent of operating point |
For the main indicators, watch T_loss (loss constitution) and Km (electromagnetic quality) — together they cover almost all of “is this motor well made.”
② Trade-off type — no good or bad, only fit: Ke (magnetic strength) high → lower top speed but less current; low → higher top speed but hungry for current and sensitive to battery internal resistance. It's an extension of gearing: decide a target Ke from the track and gear ratio first, then pick specimens near it. Two motors 5% apart in Ke aren't better/worse — they suit different track setups.
③ Consistency — it's about stability, not the value: re-measure the same motor after removing and refitting it; poor repeatability means the brush seat or axial clearance is uncertain — such a motor is unreliable however pretty its average looks, and it's a wildcard on race day.
A selection workflow and one common trap
An executable selection logic: ① first use consistency to screen out “unmeasurable” motors (poor repeatability is out) → ② group by Ke (not rank) → ③ rank within each group by one-directional indicators (T_loss primary, Km and ripple secondary).
⚠️ The I₀ trap: “lower no-load current is better” only holds within the same Ke group. Since I₀ = T_loss / Kt, a high-Ke motor can read lower I₀ even with larger losses. Comparing I₀ across the whole batch systematically favors high-Ke units — and high Ke is exactly a disadvantage where you need top speed. So always group first, then rank.
Further reading: the overall measure / compare / judge-health framework is in the three-pillar methodology for motor analysis; how to break in once you've picked a good motor is in the complete motor break-in guide; deciding a target Ke by track is in track analysis & motor selection.
Relative comparison (ranking within one batch) is very robust; but the absolute torque converted from Kt depends on the accuracy of R, and brush contact resistance varies with current and speed — the largest source of systematic error. Everyday selection ranking is unaffected — only when matching against a datasheet or simulation do you need further calibration.